
CANopen-Gruppe definiert Kommunikationsprotokoll
Von Dalen Miller und Colin Zauner | Kommunikationssysteme | Juli 1, 2018
6 Minuten zum Lesen

Die CANopen Special Interest Group Lift definierte das CiA 417-Anwendungsprofil als offenes, herstellerneutrales Kommunikationsprotokoll für Aufzugsanlagen. Es ermöglicht die Plug-and-Play-Interoperabilität zwischen Antrieben, Steuerungen, Türeinheiten, HMIs und Displays. Der COMBIVERT F5 von KEB implementiert CANopen Lift und nutzt ein standardisiertes Objektwörterbuch, Heartbeat-Überwachung und ein virtuelles Terminal mit ISO 88915-ASCII-Codes, um die Fernparametrierung und -diagnose zu vereinfachen. Die zugrundeliegende CAN-Hardware bietet weit verbreitete, kostengünstige Controller-Chips und eine robuste Fehlerbehandlung zur Minimierung von elektromagnetischen Störungen und Datenbeschädigung. KEB-Antriebe verwenden CANopen zur Geschwindigkeits- und Positionsregelung mit CAN-Encodern. Dies ermöglicht die direkte Steuerung über die Etage, reduziert die Belastung der Steuerung und verbessert Fahrkomfort und Sicherheit bei gleichzeitiger Senkung der Konstruktions- und Wartungskosten.
KEB drive nutzt den herstellerneutralen Plug-and-Play-Standard.
von Dalen Miller und Colin Zauner
Der zuverlässige und sichere Betrieb von Aufzugssystemen erfordert die Interoperabilität zwischen vielen miteinander verbundenen Geräten. Während des gesamten Lebenszyklus der Aufzugsanlage droht bei einer Fehlfunktion oder einem nicht bestimmungsgemäßen Betrieb der gesamten Anlage die Abschaltung der gesamten Anlage. Dies gilt insbesondere für moderne Aufzugsanlagen, die mit vielen vernetzten elektronischen Geräten ausgestattet sind. Die Interoperabilität jedes vernetzten Geräts wird zu einer Herausforderung, wenn Geräte Informationen über verschiedene Kommunikationsprotokolle austauschen.
Vor diesem Hintergrund wurde eine technische Gruppe namens „CANopen Special Interest Group Lift“ innerhalb von CAN in Automation (CiA) gebildet, um ein Standard-Kommunikationsprotokoll zu definieren, das von allen vernetzten Geräten im Aufzugssteuerungssystem verwendet werden soll. Solche Geräte können Frequenzumrichter, Kabinensteuerungen, Türsteuerungen, Eingabepanels, Anzeigegeräte etc. sein. Das Anwendungsprofil CiA 417 für Aufzugssteuerung wurde als offenes standardisiertes Protokoll zur Kommunikation für Geräte in einem CANopen-Aufzugssystem definiert. CiA 417 basiert auf dem Kommunikationsprofil CANopen, das in vielen industriellen Anwendungen weit verbreitet ist. Das Ziel der Erstellung eines Standard-Kommunikationsprotokolls besteht darin, ein herstellerneutrales Aufzugssystem unter Verwendung von Plug-and-Play-Komponenten zu schaffen. Dies gibt Benutzern die Freiheit, Produkte verschiedener Hersteller zu kombinieren, ohne sich um Inkompatibilitätsprobleme kümmern zu müssen. Zu den Vorteilen der Schaffung eines Plug-and-Play-Systems gehören reduzierte Kosten und Zeit bei der Konstruktion, Installation und Wartung des Aufzugssystems.
Die Produktfamilie COMBIVERT F5 mit CANopen Lift (CiA 417)-Operator wurde für den Einsatz in Aufzugsanwendungen entwickelt. Der CANopen Lift Operator wurde auf einem bereits bewährten Aufzugsprogramm aufgebaut, das eine breite Palette speziell entwickelter Funktionen umfasst, um die Installationszeiten zu verkürzen und eine leistungsstarke Fahrqualität ohne Abstriche bei der Sicherheit zu bieten.
Offenes Standardprotokoll
CiA 417 definiert ein Standard-Kommunikationsprotokoll, das von allen Geräten am Kommunikationsbus für Aufzugsanlagen verwendet wird. Jedes Gerät kommuniziert bei der Übertragung von Informationen nach denselben Regeln. Dies bedeutet, dass die Übertragung von Informationen an alle Geräte am Bus einem gemeinsamen Format und einer gemeinsamen Bedeutung folgt. Darüber hinaus werden alle Informationen über denselben Kommunikationsmechanismus gesendet und empfangen. CiA 417 definiert alle Parameter, Befehle und Dienste, die von der Aufzugsanlage verwendet werden. Der Grundstein von CiA 417 ist sein einzigartiges Objektverzeichnis, das unter anderem definierte Ein-/Ausgabeeinstellungen, Konfigurationseinstellungen und spezifische Gerätekennungen enthält. Mit dieser gemeinsamen „Sprache“ versteht jedes Gerät am Bus alle gesendeten und empfangenen Befehle oder Statusmeldungen.

Darüber hinaus ermöglichen CAN-Bussysteme (Controller Area Network) den gleichzeitigen Informationsaustausch mit allen Geräten (Bild 1). Jedes Gerät ermittelt dann individuell die Bedeutung jeder Nachricht und entscheidet, wie es reagieren soll. Geräte am CAN-Bus können so programmiert werden, dass sie Fehlermeldungen anderer Geräte lesen und darauf reagieren. Geht beispielsweise der Aufzugsantrieb in einen Fehlerzustand, würde der Antrieb eine entsprechende Fehlerbeschreibung an alle Geräte am Bus aussenden. Der Zustand des Laufwerks ist allen Geräten bekannt, die für den Empfang von Nachrichten vom Laufwerk programmiert sind. Der Zugriff auf Statusinformationen auf allen Geräten kann dazu beitragen, den Zeit- und Kostenaufwand für die Fehlerbehebung und die Behebung von Problemen zu reduzieren.
Das Heartbeat-Protokoll ist eine zusätzliche Spezifikation, die eine zuverlässige Kommunikation und schnelle Fehlerbehandlung gewährleistet. Jedes Gerät sendet periodisch eine kurze Nachricht auf dem Bus, die jedem anderen angeschlossenen Gerät anzeigt. Diese Nachricht wird als Herzschlag bezeichnet. Der Heartbeat wird verwendet, um die Verbindung und den Status jedes Geräts am Bus zu bestätigen. Jedes Gerät sollte so programmiert werden, dass es den Herzschlag anderer Geräte überwacht, mit denen es kommunizieren muss; zB das Laufwerk und die Steuerung. Wenn ein Gerät innerhalb einer bestimmten Zeit nicht reagiert, kann das Master-Gerät eine bestimmte Aktion ausführen, um das Gerät zurückzusetzen oder einen Fehler auszulösen. Geräte sind so konfiguriert, dass sie einen bestimmten Heartbeat von anderen Geräten empfangen; Beispielsweise erzeugt der Controller einen Heartbeat und der Antrieb empfängt ihn. Wenn der Antrieb den Controller-Heartbeat nach der angegebenen Zeit nicht empfängt, führt er die programmierte Reaktion aus.
Virtuelles Terminal
CiA 417 ermöglicht den Zugriff und die Anpassung der Parameter aller Geräte, unabhängig vom physischen Standort, mit jeder Mensch-Maschine-Schnittstelle (HMI). Der Fernzugriff auf jedes Gerät erfolgt über das virtuelle Terminal. Beispielsweise kann die Einstellung eines Antriebsparameters sehr schwierig sein, wenn der Aufzug maschinenraumlos (MRL) ist und der Antrieb im Schacht montiert ist. Mit dem virtuellen Terminal wird dies vereinfacht, da es möglich wäre, Fahrparameter direkt von einer Fahrzeugsteuerung aus einzustellen. Das virtuelle Terminal verwendet virtuelle Tastaturcodes (Abbildung 2) und Bildschirmzeichen mit ASCII-Codes gemäß dem ISO 88915-Standard für die Geräteparametrierung und -konfiguration. Jedes HMI, das dieselben Codes und Sequenzen verwendet, kann als Bildschirm eines Remote-Geräts verwendet werden. Ist ein Funkgerät an den Bus angeschlossen, kann man sich auch per Smartphone aus der Ferne verbinden und als Bedientool nutzen. Die KEB-Bedienoberfläche beinhaltet das virtuelle Terminal für den universellen Zugriff auf alle Geräte am Bus.

Hardware-Vorteile
CANopen ist ein übergeordnetes Kommunikationsprotokoll, das auf dem CAN-Protokoll aufbaut. CANopen wurde ursprünglich für bewegungsorientierte Maschinensteuerungen konzipiert. Das zugrundeliegende CAN-Protokoll ist die Grundlage der Netzwerkhardware und definiert das Datenübertragungsverfahren.
CAN-Bussysteme werden in vielen verschiedenen Systemen verwendet, einschließlich Industrie- und Automobilanwendungen. Die hohe Nachfrage nach CAN-Controller-Chips hat dazu geführt, dass diese von verschiedenen Herstellern zu einem günstigen Preis in großem Umfang angeboten werden.
Aufzugssteuerschränke enthalten oft viele potenzielle Formen elektromagnetischer Störungen (EMI). Die Fehlerbehebung bei EMI und beschädigter Datenübertragung kann zu erheblichen Verzögerungen bei der Installation und zu erheblichen finanziellen Verlusten führen. CAN-Controller-Chips verfügen über eine integrierte erweiterte Fehlerbehandlung. CAN-Hardware kann Bitfehler erkennen und verhindern, dass Sender und Empfänger ungültige Nachrichten senden, bevor sie weiter übertragen werden. Fehlerprüfmechanismen umfassen unter anderem Bitüberwachungsrahmenprüfung, Bestätigungsprüfung und Fehlereingrenzung. KEB CANopen Aufzugsantriebe integrieren auch erweiterte Funktionen und Diagnosefunktionen in die Aufzugsanwendungssoftware.
KEB CANopen Aufzugsantriebe
CANopen kann im KEB-Antrieb mit Geschwindigkeitsregelung verwendet werden. Dies ähnelt aktuellen Implementierungen der Geschwindigkeitssteuerung, die verschiedene Arten von serieller Kommunikation verwenden, hat jedoch die Vorteile, die die bereits besprochene CAN-Kommunikation bietet. Viele Aufzugssteuerungen auf dem US-Aufzugsmarkt verwenden eine serielle Kommunikation, und diese Art von Anwendung kann problemlos mit der CANopen-Kommunikation durchgeführt werden.
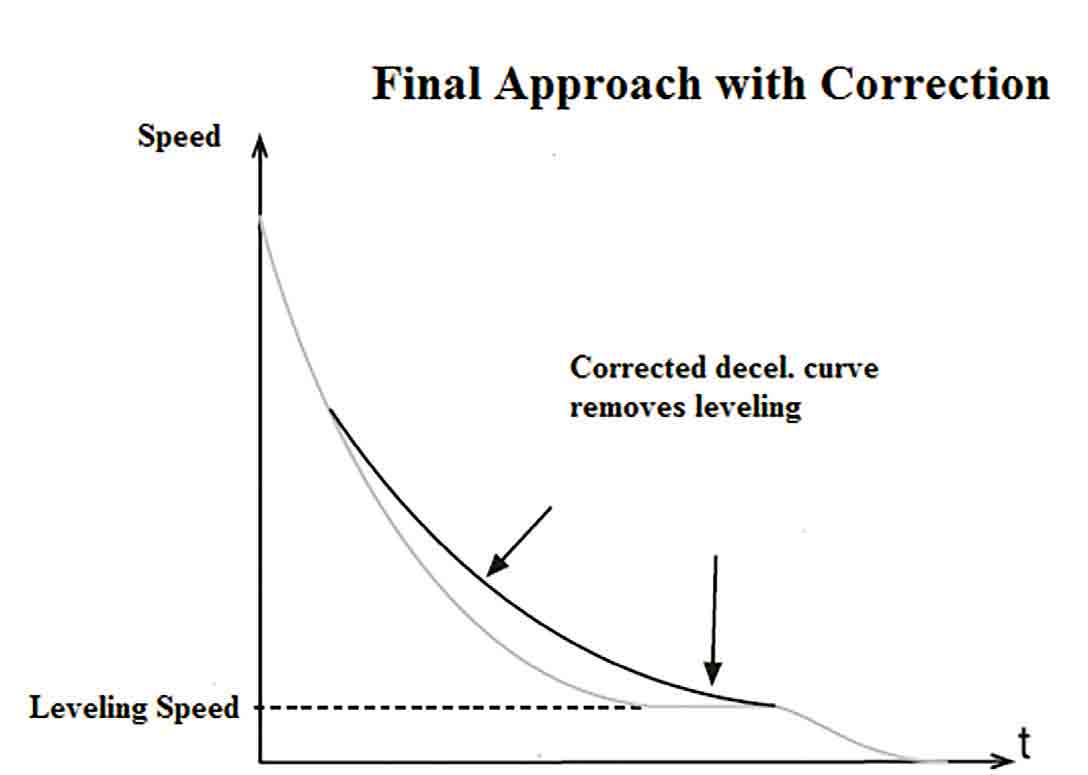
Der KEB Aufzugsantrieb verfügt auch über einen Positionsregler als Teil der Antriebssoftware. Mit dem Lageregler im Antrieb kann in Verbindung mit einem CAN-Encoder die genaue Position und Bewegung der Aufzugskabine ermittelt werden. Diese Informationen können für die Positionssteuerung direkt zum Boden verwendet werden. Dies stellt nicht nur ein optimiertes Geschwindigkeitsprofil bereit, sondern reduziert auch die Belastung der zentralen Verarbeitungseinheit des Hauptcontrollers. Die intensive Berechnung der Bremswege und die Ermittlung von Verzögerungs- bzw. Beschleunigungsraten übernimmt der KEB-Antrieb für ein sanftes und präzises Anfahren des Bodens mit minimalem Nivellierweg (Bild 3).
Fazit
Die Vorteile der Verwendung eines standardisierten Kommunikationsprotokolls in einer Aufzugssteuerung liegen auf der Hand. Es ermöglicht die Interoperabilität aller vernetzten Geräte, senkt die Kosten und bietet ein herstellerneutrales Design, das weder Fahrqualität noch Sicherheit opfert. Die CANopen-Lift-Spezifikation bietet viele Vorteile, die mit der Zeit nur zunehmen werden.
MEHR AUS DIESER KATEGORIE
NACHRICHTEN