Hydraulic Elevators in the 1950s
Jul 1, 2014

Everything old is new again.
The October 1954 issue of ELEVATOR WORLD included an article (reprinted from Power) by Frederick A. “Fred” Annett (1879-1959) titled “Hydraulic Units Stage Comeback in Modern Low-Rise Elevators and Lifts.” The article opened with the following observation: “About 40 years ago, hydraulic elevators reached their acceptance peak for low- and high-rise applications. Then, they were gradually superseded by the electric types.” Hydraulic elevator systems (of various types) had dominated the marketplace from the late 1870s to the early 20th century. However, as Annett correctly noted, the emergence of the modern electric elevator had ushered in a new era.
By the early 1950s, the electric traction elevator was perceived by many as the accepted solution to all vertical-transportation problems. However, as Annett’s article title also noted, the hydraulic elevator had “returned” to challenge its electric rival. The story of the “rebirth” of hydraulic elevators as a viable solution to low-rise applications embraces both the invention of another important 20th-century transportation system and the invention of modern electric control systems.
New inventions often lead to the development of new industries to manufacture them, as well as the creation of new supporting industries and businesses. The invention of the modern automobile in the early 20th century required the development of gasoline stations and garages, where trained mechanics could repair and service these remarkable machines. The origin of the “modern” hydraulic elevator is found in the desire to have a simple and safe means of elevating automobiles in service garages.
On September 1, 1925, Peter J. Lunati (1890-1946) received U.S. Patent 1,552,326 for “Lifting Device for Motor Vehicles.” His patent applied the concept of the direct-plunger elevator to lifting automobiles, instead of people or freight (Figure 1). This invention spurred the creation of Rotary Lift Co., which was dedicated to the production of vehicle lifts. In the 1940s, the company gradually expanded its product line to include a broad range of lifts and elevators. (In 1955, the company became a division of the newly created Dover Elevator Co.) Lunati’s lift design included a seemingly small change that constituted a significant improvement in the operation of hydraulic elevators: he proposed to use oil rather than water as his “hydraulic” fluid. In his 1954 article, Annett outlined the differences between the “old” and “new” hydraulic machines. Older systems had:
- Used water as the hydraulic fluid
- Typically employed a common pressure tank for multiple elevators
- Relied on mechanically operated valves to control the elevator’s movement
The new hydraulic elevators:
- Utilized oil, which “eliminated many troubles associated with water, such as rust, corrosion and danger of freezing”
- Featured individual “pressure systems” that included an oil reservoir or storage tank
- Used a “motor-driven positive-displacement pump”
- Employed an “electric-hydraulic control system”
Annett referred to these machines as “electrohydraulic,” which he felt was “an appropriate name for this type of elevator or lift, since it is a combination of the old hydraulic plunger type with an electric motor and electric-hydraulic control.” He also offered a comparison of the new electrohydraulic elevator to its primary competitor:
“These elevators differ from electric designs in several ways: First is their extreme simplicity. . . . Since there is no overhead equipment, hoistway columns and footings may be of smaller design. Car safeties or speed governors are not needed, because [the] car and its load cannot fall faster than normal speed.”
Additionally, because hydraulic elevators traveled at slow speeds, they could use very shallow pits equipped with simple “heavy spring bumpers” as safeties. The growing popularity of these machines and their steadily increasing market presence is indicated in Annett’s acknowledgements, where he thanked seven companies for providing information on their hydraulic elevator systems: Globe Hoist Co., Rotary Lift, Shepard Elevator Co., S. Heller Elevator Co., Rosenberg Elevator Co., Murphy Elevator Co. and White-Evans Elevator Co.
Annett illustrated the mechanical simplicity of the new hydraulic elevator in a perspective line drawing (Figure 2). It is interesting to compare this image to a similar drawing of a 1906 direct-plunger elevator (Figure 3). The older elevator employed a complex set of control valves located in the pit. This location was required, because the valves were operated via a mechanical connection. The older system also featured counterweights, which were commonly used on high-rise systems. The simplicity of the new hydraulic-elevator installation was made possible by the application of the electrohydraulic control system, which was located adjacent to the hoistway. Annett addressed the operation of these systems in a second article published in the March 1955 issue of EW (also reprinted from Power), titled “Oil-Powered Units Ensure Reliability of Modern Electric-Hydraulic Elevators, Lifts.” The typical passenger-elevator control system utilized a “horizontal-shaft constant-speed motor coupled to a gear-type rotary pump having a built-in pressure relief valve.” The pump discharged the oil “through a check valve into an oil line leading to the lift’s hydraulic cylinder,” and the check valve “oil-locked” the elevator in position when the pump stopped. The article illustrated and provided detailed descriptions of pump units designed by Globe Hoist and Rotary Lift (Figures 4 & 5).
In an article that appeared in the April 1956 issue of EW (reprinted from Consulting Engineer), Floyd Willison linked the popularity of the “simplicity” of the new direct-plunger elevator to the emergence of modern architecture: “Hydraulic Elevators and Modern Design.” Willison was identified as a “senior engineer for materials and passenger handling machinery equipment” employed by Smith, Hichman & Grylls, Inc., Architects and Engineers (Detroit).
Willison introduced his topic as follows: “Trends in building design during the past few years have created new problems for engineers, architects and the elevator industry.” These problems included modern architecture’s propensity for “sleek, long, low lines uninterrupted by architectural or structural projections,” which, of course, meant that the penthouse was now “in disfavor.” Willison noted that a “frequent solution to this problem has been the use of basement type electric machines.” He followed this observation with an interesting statement that provides insight into the contemporary elevator marketplace. He reported that, while the selection of a basement-type electric machine “gets the job done for the architect and leaves him free from potential criticism from the larger suppliers of elevator equipment, it does not necessarily represent the best expenditure of the owner’s vertical transportation dollar.” This serves as a reminder that smaller, regional companies (such as those referenced by Annett in his 1954 article) were primarily responsible for the innovations that prompted the rebirth of the hydraulic elevator.
Willison stated there were five basic requirements to be considered in elevator selection: “suitability for the service requirements, original cost, expected life, operation and maintenance cost, and safety.” While these criteria are fairly normative, his explanation of their application to hydraulic elevators reveals the transitional character of the 1950s as vertical transportation moved into the modern era. For example, “suitability” included “speed, smoothness of operation, leveling ability, method of operation, capacity, size of cab, type of cab [and] type of doors.” Within this criteria, Willison noted, “By and large, any method of control that can be used on electric elevators can be used with hydraulic elevators.” The available control types included “single automatic control, selective collective control or two-car two-button control and totally automatic multiple car systems.” He claimed the new hydraulic elevators offered the best economic value for low-rise buildings:
“The blunt fact of elevator cost is that the best in hydraulic elevators, which is equal to the best in elevator equipment, regardless of cost insofar as low-rise buildings are concerned, can be purchased for less than the cheapest type of electric elevator. Add the fact that a considerable amount of money can be saved by the elimination of the penthouse, and we have a good case for the hydraulic elevator.”
Willison also claimed these elevators had a long life expectancy, were the safest type of elevator, and that their operation and maintenance cost was “50-70% of the cost of operating and maintaining an electric elevator” designed for a similar installation.
Other EW articles appearing in the 1950s that addressed this topic included “The Electric Control of Hydraulic Elevators” by Joseph C. Tamsitt (January 1955) and the three-part series “Hydraulic Elevator Pumps” by E.M. Richman and T.A. Herman (May, June and August 1956). Tamsitt, chief engineer of Keystone Controls (Baltimore), described his article as a “report to date” on selectors and controls. He presented information gathered from 1952 to 1955 on elevator control systems. He characterized the up direction as being “more difficult to control,” and the majority of his article addressed this topic. Tamsitt reported, “The up starts were tested by both the feel of the start, and also by the means of an accelerometer.” The latter was useful in gathering “information over this period, as we felt that memory was not to be relied upon.” His investigation revealed four “groups,” or types, of control systems:
- Single pumps with single-speed motors up to 50 fpm
- Single pumps with single-speed motors up to 150 fpm
- Single pumps with two-speed motors
- Two pumps driven by single motors
Tamsitt also provided a detailed critique of each control system. He claimed that control of the down direction was essentially the same for all hydraulic elevators, writing, “The small, or leveling, valve, is opened first, with the large valve, or valves, timed [to] open thereafter.” When the car approached its destination, the large valve closed, and the small valve leveled the car with the landing.
Richman and Herman’s series concluded with a “Rotary Pump Trouble Shooting Chart” that listed seven system “symptoms,” 18 “causes” (many of which had multiple possible symptoms) and 18 “suggested cures.” The detailed nature of the chart, which was only made possible by extensive experience, reveals the increased use and popularity of the new hydraulic elevators (Figure 6). However, these new machines also had a unique connection to their past and older machines. The definition of the word “hydraulic,” according to Webster, is “operated, moved, or effected by means of water.” Taking this definition literally, the new “hydraulic” elevators were marketed as “oildraulic” elevators (a term that does not appear in Webster’s Dictionary). As noted above, their basic design was also similar to elevators designed in the early 1900s, and, although they employed Annett’s electrohydraulic control system, in his 1955 article, he also reported they accommodated an old-fashioned “control system.” Annett remarked it was difficult for the car to exceed its travel limits, because “if the operator is daydreaming and permits the car to go beyond normal limits, pump noise and relief-valve popping will rouse him quickly.” While the elevator operator was quickly becoming a thing of the past in the 1950s, this reference reminds us of the dramatic changes taking place in a decade when, at least for a brief time, everything old was new again. 🌐

Figure 1: Peter J. Lunati, “Lifting Device for Motor Vehicles” 
Figure 2: “Hydraulic Elevator” from “Hydraulic Units Stage Comeback in Modern Low-Rise Elevators and Lifts” (EW, October 1954) by Frederick A. Annett 
Figure 3: “Direct-Plunger Elevator” from “Test of a Plunger Elevator Plant,” Transactions of the American Society of Mechanical Engineers (1906) by Arthur J. Herschmann Figure 4: “Globe Hoist Passenger Elevator Power Unit” from “Oil-Powered Units Ensure Reliability of Modern Electric-Hydraulic Elevators, Lifts” (EW, March 1955) by Annett 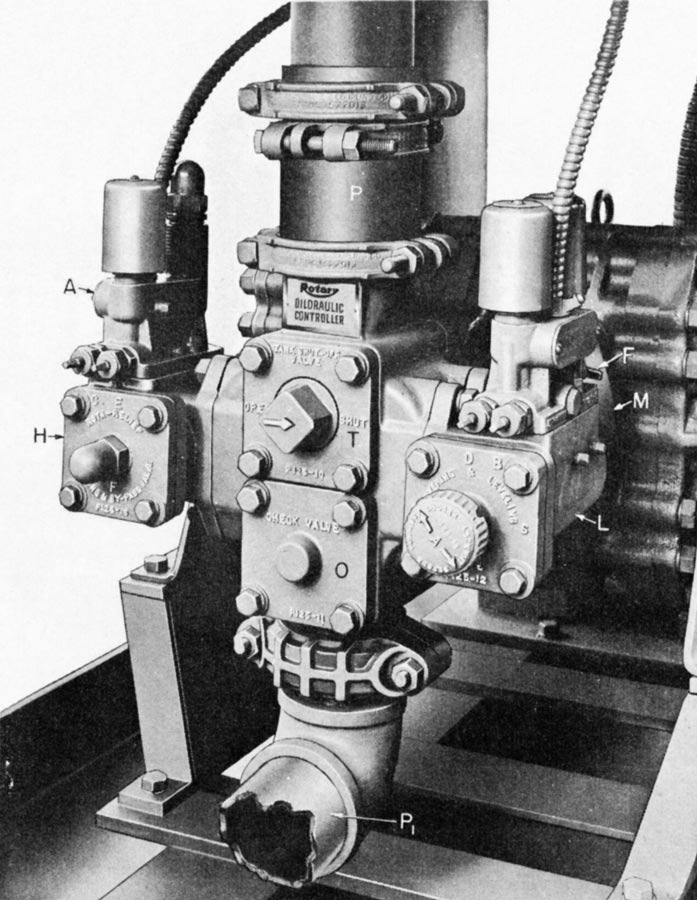
Figure 5: “Rotary Lift Valve Assembly Unit” from “Oil-Powered Units Ensure Reliability of Modern Electric-Hydraulic Elevators, Lifts” 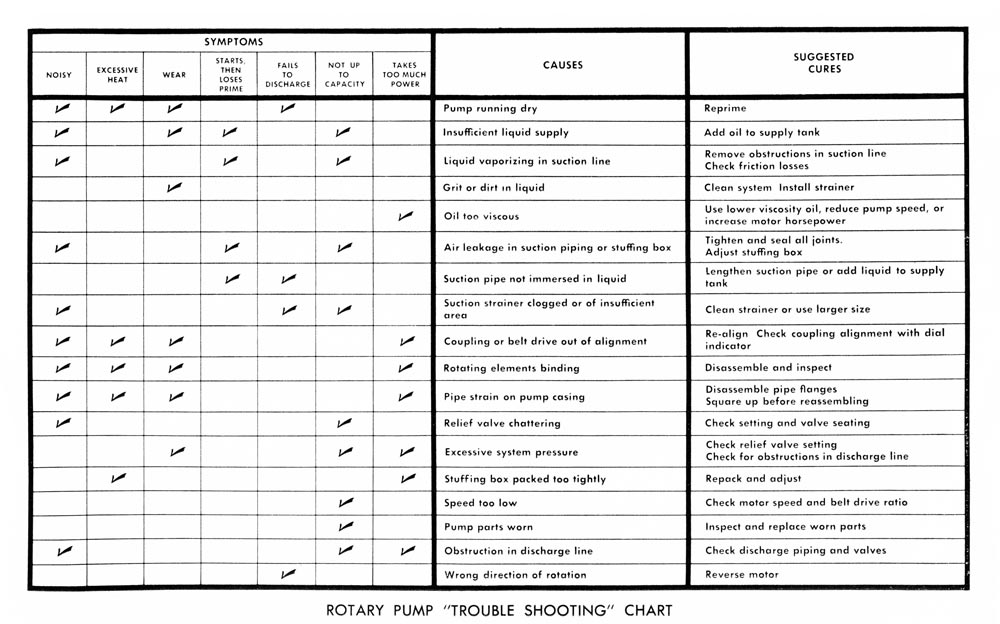
Figure 6: “Hydraulic Elevator Pumps, Part Three – Installation and Maintenance” (EW, August 1956) by E.M. Richman and T.A. Herman

Get more of Elevator World. Sign up for our free e-newsletter.