Early Machine-Room-Less Elevators
Apr 1, 2015

A brief history of the beginnings of the groundbreaking machine-room-less (MRL) elevator
Perhaps the most difficult kind of history to write is a history of contemporary events. Beyond the obvious paradox of the juxtaposition of the words “history” and “contemporary” in the same sentence, there is also the problem of attempting to devise a meaningful history of events for which there is no sense of critical distance. This absence often makes it difficult to determine the relative importance of specific events, which, in turn, impacts the accuracy of the story being told. Therefore, the following brief history of early machine-room-less (MRL) elevators should be viewed (or read) cautiously: the assessments of events may change as time passes and more information becomes available.
The invention of MRL elevators has been described as equal in importance to the invention of the modern electric traction elevator. Both systems required architects and engineers to rethink how elevators “fit” into their buildings. They also share a less apparent common trait — both required rethinking the “rules” that govern elevator installation. This “rethinking” was, perhaps, less obvious in the case of the traction elevator. Its invention more-or-less paralleled the development of the first elevator safety codes, which were written to facilitate the safe installation and use of these new machines. However, the invention of the MRL elevator occurred in the context of mature elevator safety codes predicated on the use of a specific machine (traction elevators). Therefore, the successful commercial deployment of MRL elevators required a reevaluation of existing codes. (The use of the plural “codes” reflects the presence of the diverse set of codes utilized across North and South America, Europe and Asia.) Additional factors not found in the case of the traction elevator is the presence of a global marketplace and the ongoing conversations concerning the creation of international or global safety standards. Thus, the history of MRL elevators actually embraces two parallel histories: the technical history of this new system and the ongoing history of elevator safety codes.
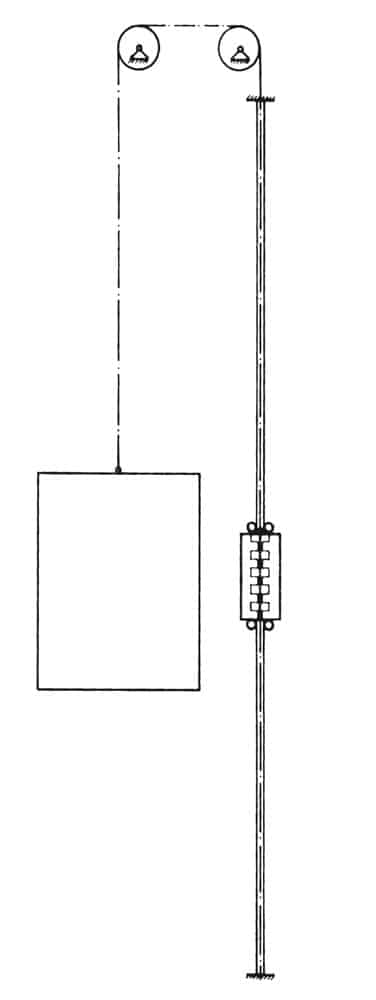
The origins of the modern MRL elevator are also associated with the development of another innovative system: the linear induction motor (LIM) elevator. The first design that utilized a LIM was developed by Karl Kudermann of Kleemann’s Vereinigte Fabriken in Stuttgart, Germany, in the late 1960s. The design was patented as “Elektrischer Antrieb für Lastenförderer,” German Patent No. 2,002,081 on July 21, 1971 (Figure 1). The patent’s title is of interest in that it refers to lastenförderer (load conveyors) rather than aufzüge (elevators). This reflects Kleemann’s primary focus on the production of industrial material-conveying equipment. Nonetheless, Kudermann’s design focused on the use of a LIM located in the counterweight to drive the elevator. Although the schematic drawing of the system clearly indicated the absence of a machine room, this feature was not mentioned in the patent text. This added benefit was, however, referenced in the second patent concerning a LIM elevator.
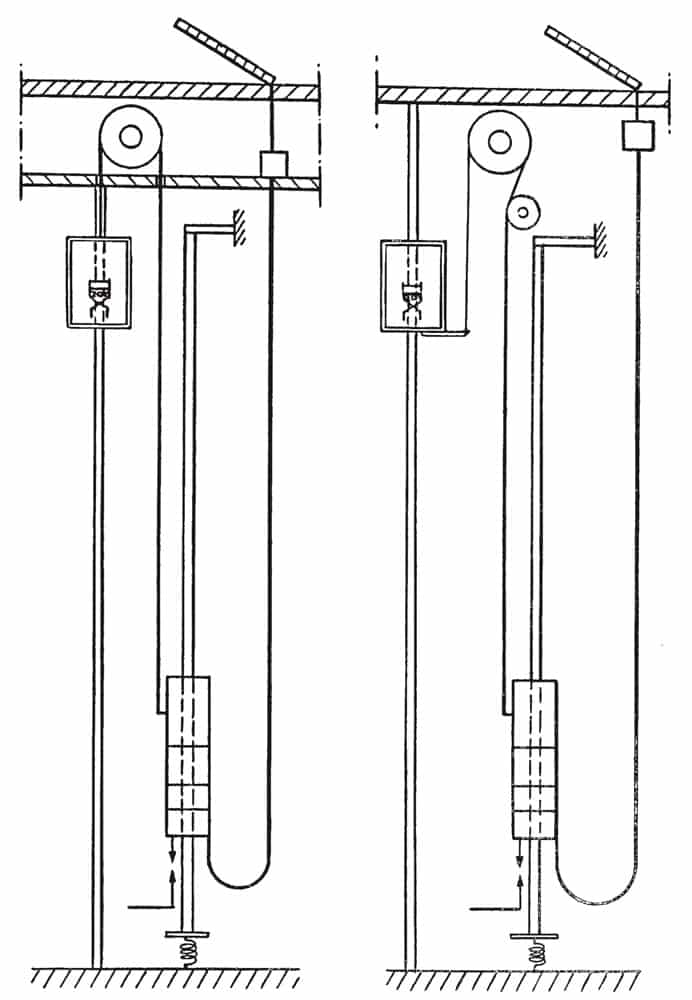
On September 30, 1980, Otis France engineers Rene Ficheux and Marcel Pavoz filed a patent application titled “Ascenseur Automoteur Utilisant Comme Contrepoids un Moteur Électrique Linéaire,” translated as “Self Powered Elevator Using a Linear Motor as a Counterweight.” The French patent (No. 2,491,045) was awarded on April 2, 1982, and an American patent (No. 4,402,386) was awarded on September 6, 1983. Two versions of the design were described and illustrated: one that included a machine-room-type space and one that eliminated the machine room (Figure 2). The latter scheme employed “a toroidal electric motor arranged to slide on a hollow cylindrical guide rail, reaching from the pit to the ceiling of the topmost story.” This design was also described as appropriate for use in “residential buildings in which penthouse machinery is forbidden.” This statement is the first, albeit indirect, reference to existing safety codes.
The “Innovation” column of the December 1983 issue of ELEVATOR WORLD included the text of Ficheux and Pavoz’s patent and the drawing that depicted the machine-room-less scheme. This introduction was followed by a slow, but steady, series of announcements that chronicled Otis’ development of its LIM design, which culminated in a feature article by EW founder William C. Sturgeon, “The LIM Elevator Drive,” published in March 1991. Sturgeon reported:
“The initial LIM development was carried out with the assistance of Ernest P. Gagnon of the United Technology Research Center in Farmington, Connecticut, where a computer model was created, and the first engineering model [was] built and tested.”
The project shifted to France, where, Sturgeon wrote, the “first production model was designed and built by Leroy-Somer to Otis requirements.” The model was then “installed in the Gien test tower of Otis France.” Although no timeline was given for these events, it is reasonable to assume they occurred in the early 1980s and were associated with the development of Ficheux and Pavoz’s patent.
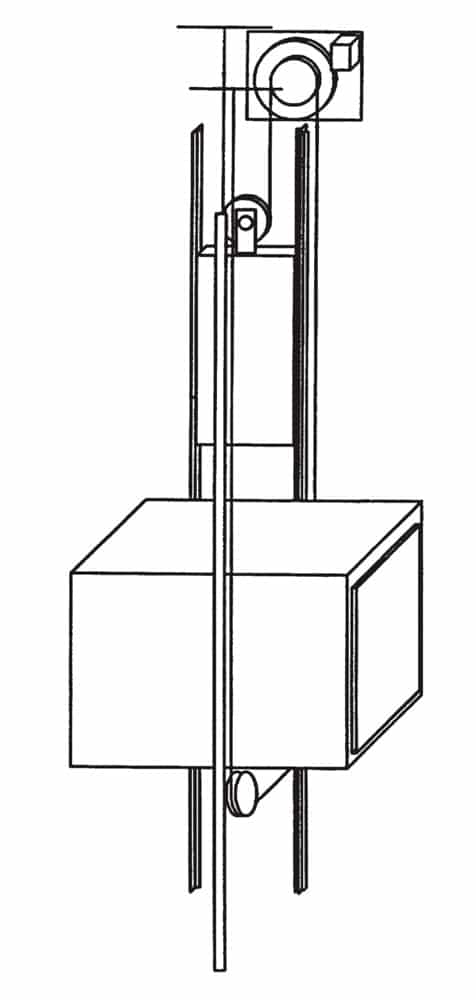
After this initial flurry of activity, Sturgeon noted, “The linear drive slipped out of the news.” However, he reported that by the late 1980s, information about the elevator had begun “to drift out in the form of clippings from Japanese newspapers,” which revealed Otis had shifted its research efforts to Japan. In 1990, the first public presentation of Otis’ LIM elevator was given by Keichiro Nakai of Nippon Otis at the 40th anniversary of the Japan Elevator Association. The elevator employed a tubular LIM, which traveled along an aluminum-sheathed steel column that extended the height of the hoistway. The motor was housed in the counterweight, which also contained the brake, roller guides and velocity sensor (Figures 3 and 4). In May 1990, EW reported Nippon Otis was “installing the world’s first linear elevator drive in the Tokyo office building of Bansei Construction Co. A second unit will be installed in Bansei’s employee dormitory in Kawasaki.” EW also reported that because the new design differed “so greatly from conventional types, each installation must be approved separately by Japan’s Ministry of Construction.” While it is unknown whether it was the innovative drive system or the fact that the “space for a drive motor at the top of the shaft was eliminated” that caused the greatest concerns, this statement indicates the challenge the LIM elevator presented to Japanese code officials.

Otis recognized Japan was not the only country in which officials needed to be introduced to, educated about and, finally, persuaded that LIM elevators were a safe addition to the marketplace. Therefore, the company launched a publicity/educational campaign in the U.S. In August 1990, Otis engineer George W. Gibson gave a “colorful slide presentation” titled “New Technology in Elevator Systems” to the 19th Annual Workshop of the National Association of Elevator Safety Authorities (now NAESA International). He later repeated his presentation at the ASME A17 Main Committee meeting, which was held in Mobile, Alabama. Sturgeon, in his March 1991 article, characterized these presentations as Otis’ attempt to “indoctrinate attendees concerning linear drive basics and the application to elevators, thus paving the way for discussion and eventual acceptance of this modern drive in the U.S. marketplace.” He reported that questions about the new system concerned “access for inspection, column sway, fire hazard, environmental impact upon hoistway drive mechanism, oscillation of the drive/counterweight in event of an earthquake, operation in the event of a power outage or fire, and safety for maintaining/inspection personnel.”
At this time, the current code (A17.1-1990) contained a slight paradox. Sturgeon noted the code appeared to “encourage innovation.” Indeed, its preface stated: “If a new approach meets the accepted standards for safety, latitude and exception shall be granted.” At the same time, its provisions were clearly restrictive: for example, Rule 101.6 Location of Machine Rooms and Control Rooms read, “Elevator machine and control rooms shall be located overhead or adjacent to, or underneath, the hoistway. They shall not be located in the hoistway.” This language was introduced into the A17.1 code in 1985. Prior to this date, Rule 101.6 was titled “Storage of Materials in Machine and Control Room,” and the previous code did not, apparently, reference or specifically restrict machine-room location. If this reading is correct, it prompts the question: “Why was the code changed in 1985?”

Sturgeon also referenced a “recent patent” by Marcel Pavoz that concerned a variation of the original Ficheux and Pavoz scheme. The new design eliminated “the overhead sheaves in line with the cab and counterweight. Instead, sheaves are located laterally of the cab on both sides in what is sometimes called a bridle hitch” (Figure 5). The patent was “Sheave Array of a Self Propelled Elevator Using a Linear Motor on the Counterweight,” (U.S. Patent No. 4,949,815 issued August 21, 1990). Pavoz, in the section of the patent titled “Background Art,” reiterated the fact that, in the initial design, the sheaves were “merely guide sheaves. . . [and were] not connected to a drive motor, and there is no need to have a machine room, either overhead, or below the cab.” However, he also noted:
“In some areas of the world, safety codes require that overhead sheaves not be installed in the hoistway directly above the roof of the cab. Compliance with these codes results in a very complex roping arrangement, typically requiring two sheaves mounted on the cab frame below the floor of the cab, and wherein a 2:1 roping ratio is used. This arrangement is complicated and costly, as it requires extra sheaves and an excess of rope.”
This statement is evidence that Pavoz, and, thus, Otis, were attempting to improve their original design such that it could more easily be accepted by current safety codes.
While Otis’ LIM elevator failed to achieve the hoped-for commercial success (its higher cost was not offset by the expected construction cost savings), it sparked a wave of innovation in the 1990s focused on the development of machine-room-less elevators. The story of KONE’s pursuit of an MRL design was outlined in 2006 by Harri Hakala in a paper titled “10th Anniversary of MRLs,” which was presented at the 2nd European Lift Congress in Heilbronn. (The paper was republished in Lift Report, Issue 6, 2006.) Hakala stated that industry interest in this new system prompted the pursuit of approximately 150 LIM-elevator-related patents by 1995.
KONE began its investigation of LIM drives in late 1991. However, by late 1992, its focus had shifted to the development of a “combination friction drive and rotating machine” located in the counterweight. Although this approach was abandoned due to concerns about servicing the drive, the concept of using a flat motor remained and was developed into what Hakala described as “a kind of motorized traction sheave.” As discussed and illustrated in one of the early patents concerning this design, the drive had a flat profile and was located near the top of the hoistway (Figure 6). The first “running prototype” was built in 1993, and by mid 1994, a full-scale prototype was running in the KONE research center in Hyvinkää, Finland.
As was the case with Otis, KONE’s technical development had a parallel initiative aimed at overcoming restrictions found in current European elevator safety codes. In his 2006 presentation, Hakala outlined the problem:
“In the mid 1990s, most countries had their own safety codes, which were usually modified from some general standard, like IEC or DIN. It was also common to have official inspection by authorities before allowing an elevator for public unattended use. . . . The importance of the standard varied, too. In some of the countries, standards were only engineering recommendations, while in others, they were part of the legislation. Inside the EU, development was moving towards a common standard. There were already Harmonized European Standards (EN 81-1 and EN 81-2), but they were optional; countries could set their own standards, too. . . . Standards provided quite detailed technical requirements for elevators, and they were de facto design rules for elevator manufacturers as inspectors referred to them. For example, paragraph 6.1.2 states:
“‘The machine and its associated equipment shall be in a special room, comprising solid walls, ceiling and door and/or trap.’ However, there was a possibility to deviate from the standard. Paragraph (prEN 81-1) 0.0.4 stated: ‘When mention is made of a design for the sake of clarity; this should not be considered to be the only possible design; any other solution leading to the same result can be applied if it is equivalent in operation and at least equally safe.’ This option left the suppliers the responsibility to prove equal safety as noted in the code. Therefore, it was rarely used and had to be repeated for each country or even every delivered lift.”
KONE’s solution was predicated on the anticipated implementation of what Hakala called a “new lift directive” set to go into effect on December 31, 1997. He explained: “At this point, when some of the Notified Bodies in the EU accepted a certain construction, other EU members had to accept it.” KONE thus began working with “Dutch authorities” in 1994, and on March 3, 1995, the first MonospaceTM elevator, installed in KONE’s office building in Voorsburg, the Netherlands, was “accepted for use,” and the “official product launch took place in Brussels in March 1996” (Figure 7).

The innovative spirit that fostered the development of Otis’ LIM elevator and KONE’s Monospace elevator — and the goal of producing commercially viable MRL elevators — permeated the industry in the 1990s, and by the dawn of the new century, Mitsubishi Electric, Otis, Schindler, ThyssenKrupp Elevator, Toshiba and others had introduced new MRL elevator designs. And, efforts to modify and rewrite safety codes such that they accommodate (and perhaps encourage) innovation remain a critical topic of discussion in the 21st century.
Your author is aware that this brief (perhaps “partial” is a better term) history of MRL elevators has many gaps and that additional corporate stories of MRL development in the 1990s would enhance our understanding of the creation of this revolutionary system. A critical missing piece is what may be thought of as a “patent genealogy” that identifies the most important patents found in the hundreds of MRL-related patents. And, although your author has written on the early history of the A17.1 code, it is clear that additional histories that address American, European and Asian safety codes are required to understand the context of the past and present debates. Information on any of these topics would be welcome at your author’s email: [email protected].

Get more of Elevator World. Sign up for our free e-newsletter.