Elevator Remote-Monitoring Method
Aug 1, 2012

Aimed to improve elevator-monitoring system compatibility, signal acquisition and processing units are discussed.
by Li Shiqun, Zheng Jiong, Luo Zhiqun and Wan Janru
To ensure the safe and reliable function of elevators, it is necessary to monitor their running state and failure conditions. For the convenience of determining and transferring the elevator faults, this paper classifies the elevator faults and edits the codes first. To improve the efficiency of the elevator monitor, a signal-acquisition unit consisting of a sensor on the top of the lift car and another part in the control cabinet is used. The signal-acquisition unit based on the AVR reduced instruction-set microcontroller is designed to collect and process the elevator signals. Then, the fault code and other information are output. Afterward, the acquisition and processing of the elevator fault signals are simulated by using the Proteus software.
As microprocessors and transmission technologies are developed, elevator remote monitoring is continuously improved. However, presently, elevator monitors are mostly proprietary and incompatible with other manufacturers‘ equipment. This article presents a universal elevator remote-monitoring method, adopting general packet radio services (GPRS) technology to realize the wireless transmission of the elevator signals, which solves the weakness of the cable transmission, such as high cost and difficulty in maintaining. The central monitoring unit designed in the Visual Basic (VB) language dynamic cannot only display the fault information, but also the dynamic simulation operation of the elevator.[1]
Classification and Coding of Elevator Faults
For the convenience of signal acquisition and to improve efficiency of elevator maintenance, we need to classify the elevator faults. According to the severity, the elevator faults can be divided into general and serious faults. When a general fault occurs, the elevator needs to be quickly stopped and run to the flat floor area. Emergency electric operations should be performed before the fault is cleared. When a serious fault occurs, the elevator needs to be quickly stopped and cannot be operated until the fault is removed. For the convenience of transferring the signals, this article includes edited fault codes. According to the fault information, such as the codes, monitoring-center staff can judge the type and severity of the fault and arrange a technician to remove the fault as soon as possible.
Your authors have edited the codes of 38 common elevator faults. For example, common general faults and their codes include: button stuck (0501), dead start (0601), too-low power voltage (0701), running-time limit for action (1001), too-high drive-system temperature (1201), inspection traveling mode (2001) and fire-service mode (2101). Common serious faults include: safety-loop disconnect (0110), door-lock loop disconnect at runtime (0203), closed fault (0302), the cabin stopping far from leveling zone (0401), open fault (1301), elevator speeding fault (1401), elevator running up to the top (1501), elevator running down to the bottom (1601), alarm indicator (1901) and entrapment (2201). When there is no fault, the code is 0000.
System Architecture
The elevator remote-monitoring system consists of three parts: signal acquisition and processing unit, GPRS wireless signal-transmission unit and central monitoring unit. The signal-acquisition and processing unit detects elevator-status and fault signals, and its microprocessor processes them. Then, the signals are transported to the central monitoring unit through the GPRS wireless signal-transmission unit. The central monitoring unit realizes the elevator real-time simulation operation, fault display, fault storage and other functions.[3]
Signal-Acquisition and Processing Unit
The part of the signal-acquisition union atop the lift car is mainly composed of various sensors, such as those for the door switch, load measuring, limit and temperature. The part in the control cabinet mainly collects signals, such as those for power, fire, safety loop, inspection and interlock. We chose the ATmega16 Singlechip to constitute the signal-acquisition and processing unit. The unit collects the signals of the elevator and judges whether the elevator breaks down. It consists of the chip, and data-acquisition, data-transmission, power, memory and reset modules (Figure 1).
Hardware Design
Switch signals (such as the maintenance and alarm signals) can be collected by the Singlechip through optocouplers (Figure 2).
Collecting analog signals (such as temperature and speed signals) is more complex. This study adopts LM45 as the temperature sensor. After being filtered, the amplifying disposition, output voltage signal is sent into ATmega16, where the analog signal is converted to a digital one and compared with the setting. The result is then output. The temperature signal acquisition circuit diagram is shown in Figure 3.
According to the collected signals, the Singlechip judges whether a fault occurs, and, if so, what kind of fault occurred, then generates the fault code and other information. If the interface signal is not open, according to the signal-acquisition part on the top of the lift car, we can judge the faults as noted in the previous section “Classification and Coding of Elevator Faults,” with the exception of running modes. If the interface signal is open, we can judge running modes as well, thanks to the signal-acquisition part in the control cabinet.
Software Design
The software design of the signal acquisition and processing unit consists of three parts: main process, analog/digital conversion process and fault-code output process. The programming language used is C. The source code is written in the integrated development environment ICCV8 for AVR Code Blocks IDE.[4] Initialization of the main process includes setting the timer to “0,” setting the input/output ports, setting the analog digital transformation mode, etc. (Figure 4).
Simulation Analysis
Proteus is used to simulate the signal-acquisition and processing unit. The chip 74HC4051 was chosen to achieve the multichannel data acquisition, and the generated fault code is displayed on four seven-segment displays. The connection and disconnection of the switch can withstand the change of a switching value, and the corresponding fault code will be shown. Meanwhile, an analog change can be simulated by changing the input voltage value. For example, when the temperature of the elevator drive system is too high, it should output the fault code 1202 (Figure 5).
GPRS Wireless Signal-Transmission Unit
GPRS has several advantages, such as wide application, high data rate, interconnection with the external data network and good resource utilization. Thus, this technology was chosen for the signal transmission of the elevator.[5] The wireless signal-transmission unit consists of the microprocessor, data terminal equipment (DTU) module, GPRS network and Internet. The microcontroller will transmit the fault code and other information to the DTU module through the MAX232. Then, the DTU module will send the information to the GPRS network. Afterward, the information is sent to the central monitoring unit through the Internet (Figure 6). The DTU module consists of an Internet controller, GPRS/code division multiple access module, power module and external interface.[6]
Central Monitoring Unit
When the elevator is in normal operation, the central monitoring unit receives operation-status information of the elevator in real time. It can realize the dynamic simulation of the operational process, including starting, accelerating, smooth running, deceleration, braking, leveling, door open and door close. At the same time, the screen displays the appearance and disappearance of call ladder signals, operation direction, floors, etc. When a fault is detected, the central monitoring unit will receive and display the fault code and other information. At the same time, the message will be added to the fault database and sent to the technician, who will then be able to go directly to the fault scene. We can realize this function by using VB language. ActiveX is adopted to design the operation interface, such as “Image,” “Label” and “TextBox.” The real-time simulation-operation interface of the elevator is shown in the Figure 7.
We adopt the Microsoft® Access database to establish the fault-information database of the elevator (Figure 8).[7] The database records the time, place, name of fault and other details. After the database is established, it can link to VB through Data ActiveX, Adodc ActiveX and Grid ActiveX.
Conclusion
To conveniently determine and transfer elevator faults, the faults are classified and the codes are edited first. Aiming to improve the current poor state of elevator monitoring-system compatibility, this study divided the signal acquisition and processing units into two parts. One part is universal (to all elevators), while the other can only be used by the elevators that open their ports. The signal-transmission unit uses GPRS technology, which improves flexibility and reduces cost. The central-monitoring unit cannot only display and store the fault information, but it can also realize the dynamic simulation operation of the elevator.
Acknowledgments
This project was supported by the National Natural Science Foundation of China and AQSIQ Nonprofit Industry Specialized Research Funding Projects (200910097, 201010057).
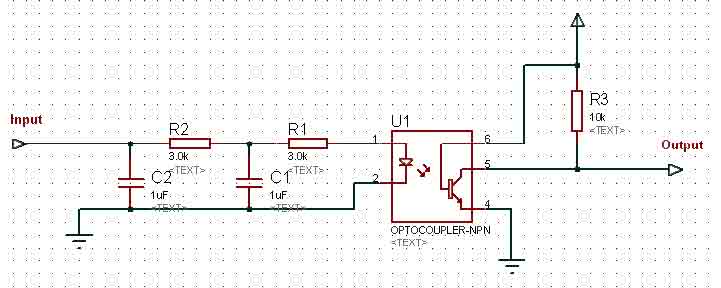
Figure 2: The collection circuit diagram of the switch signal 
Figure 3: The temperature signal acquisition circuit diagram 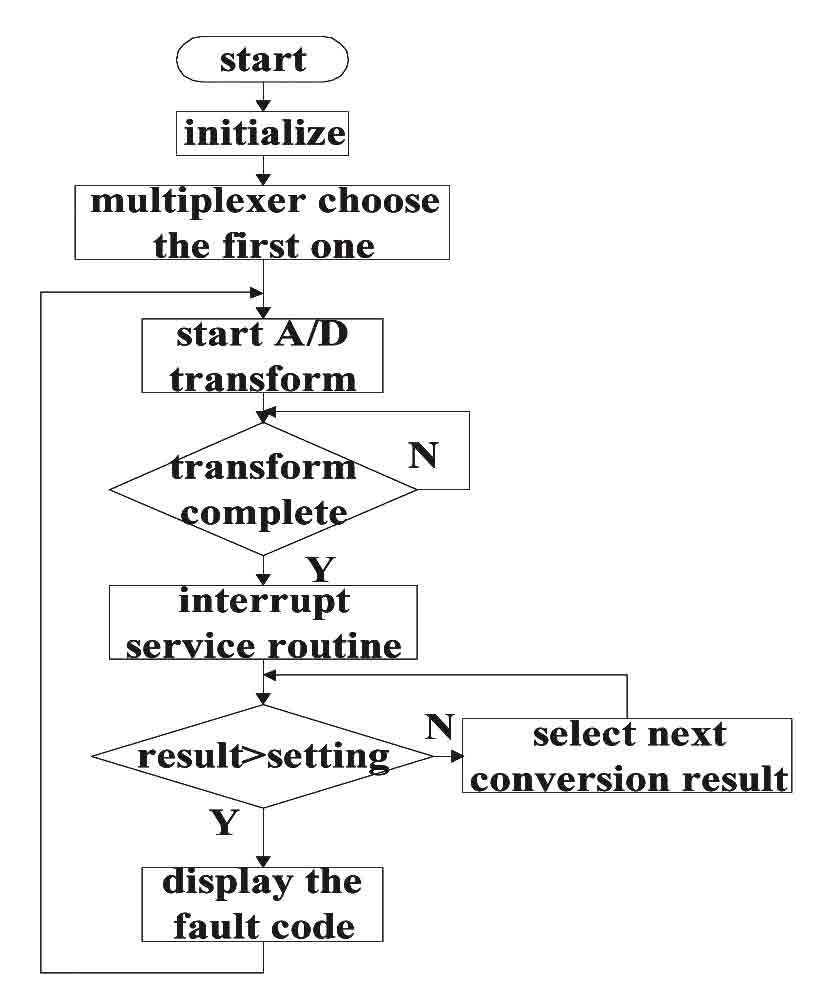
Figure 4: A flowchart of the main process 
Figure 5: Simulation result 
Figure 6: A block diagram of the GPRS wireless signal-transmission unit 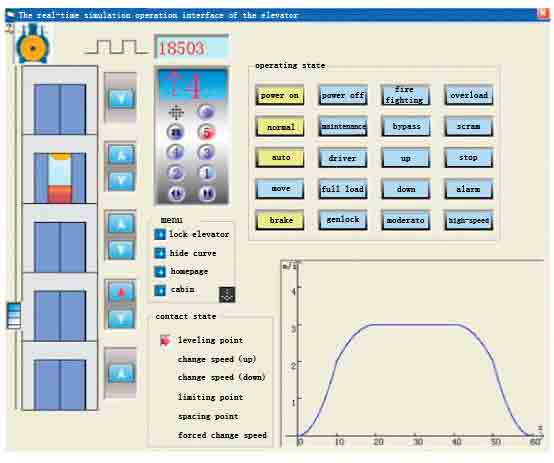
Figure 7: The real-time simulation operation interface of the elevator 
Figure 8: The fault database of the elevator
References
[1] Yuji, Tanaka. “A Friendly Remote Monitoring System” [J]. Elevator, 2001, 8(2): 59-71.
[2] M. Stansfield. “A Typical Interface Problem in Remote Monitoring of Lifts” [J]. ELEVATOR WORLD. 1994,4: 23-28.
[3] W. Jianru, C. Chao, S. Yangjian. “Elevator Remote Monitoring System Adopting the Singlechip with Dual Serial Port” [J]. Computer Measurement and Control, 2006, 14(7): 900-901.
[4] R. Kalden, I. Meirick, M. Meyer. “Wireless Internet Access Based on GPRS” [J]. IEEE Personal Communications, 2000, 7(2): 8-18.
[5] G. Zongran, M. Lifan, Y. Yanjun. “Wireless Data Transmission System Based on GPRS” [J]. Electrical Measurement and Instrumentation, 2010, 47 (536A): 46-48.
[6] Dr. Albert T.P. So, S.K. Liu. “An Overall Review of Advanced Elevator Technologies” [J]. ELEVATOR WORLD, 1996, 44(6): 96-101.
[7] W. Jianru, L. Zhiqiang, Y. Huajun, C. Gang. “The Elevator Fault Remote Monitoring and Dynamic Simulation Operation” [J]. Automation and Instrumentation, 2001, (3): 36-37.
Get more of Elevator World. Sign up for our free e-newsletter.








