An Apparatus for Measuring Velocity, Deceleration and Stopping Distance of Escalators and Moving Walks
Mar 1, 2013

by Yihui Ruan, Yucheng Qin, Baosheng Tang, Liang Ye and Mingtao Chen
It is estimated that 2.5% of all escalator stops lead to passenger falls, which can cause injury, and, in extreme cases, lead to multiple passenger falls. Emergency-stopping criteria for escalators are twofold and conflicting: to stop the escalator within a specified distance, yet achieve that stop in a way that does not cause passenger falls. These two requirements necessitate a compromise, and it is important to specify a criterion that satisfies both.
GB 16899-2011 and other standards equivalent to the European new escalator and moving walks standard (EN 115-1:2008) stipulate stopping distances and deceleration during the operation of the braking system. Stopping distances for unloaded and downward-moving loaded escalators shall be as given in Table 1. Stopping distances for unloaded and horizontal- or downward-moving loaded moving walks shall be as given in Table 2. Stopping distances shall be measured from the time the electric stopping device is actuated. Deceleration, measured on a downward-moving escalator in the direction of travel, shall not exceed 1 mps² during operation of the braking system. Deceleration, measured on a downward- or horizontal-moving moving walk in the direction of travel, shall not exceed 1 mps² during operation of the braking system.
This article introduces a new testing apparatus that can make use of an advanced microcontroller to test operating velocity, deceleration and stopping distance of escalators or moving walks in real time. The utility model is characterized in simple structure, small volume, high response speed, low energy consumption and high reliability.
Composition of Measurement and Measuring Principle
The portable measuring and recording apparatus is to detect, analyze and report the operating velocity, deceleration and stopping distance of escalators and moving walks. The instrument is composed of a wireless transmitter, a wireless receiver, a group of keys, a wheel measuring sensor, a microcontroller, a printer, a display screen and other electronic accessory components (Figure 1). Measurements may be made from landing, with the escalator running in either direction. The wheel measuring sensor is applied against the external surface of the step, pallet or belt. The apparatus can measure operating velocity of the step, pallet or belt in real time. Deceleration and stopping distance are simultaneously measured by detecting a stopping action with the wireless triggering device. The three values can be shown on the display screen.
The wheel measuring sensor externally measures the step, pallet or belt motion of the escalator or moving walk and generates electrical pulses encoding those measurements. In the wireless transmitter, a stop trigger can activate the emergency-stop switch and coordinate the resulting activation of the escalator’s brake system with these motion measurements. The wireless receiver can identify the transmitter’s signal and instantly inform the microcontroller. The wheel measuring sensor generates at the moment the microcontroller starts to calculate electrical pulses. The sensor includes an incremental encoder, the output waveform of which is a square wave. Its wheel radius is represented by r. If a pulse is generated, when the rotation angle of the wheel is q, the displacement of the wheel is rqπ/360. If the number of the generating pulses within a second is m, the displacement of the wheel is rqmπ/360, the velocity value of the escalator or moving walk.
When the escalator or moving walk stops, the microcontroller ends calculation of electrical pulses and begins calculating stopping distance and deceleration according to angular displacement and radius of the wheel measuring sensor. During the operation of the braking system, the total pulses are n. The electronic circuitry collects and processes these pulses, and a tester can make use of a computer to design software to display, analyze, save and print test data in real time. The stopping distance of the escalator or moving walk is rqnπ/360. When the emergency-stop switch is activated, two speed values of the step, pallet or belt in chronological sequence can be selected in the program. The difference between the values is divided by time difference on two speed values to obtain the real deceleration value.
SC2262 is a remote-control encoder paired with SC2272 utilizing complementary metal-oxide semiconductor transistor technology. It encodes data and addresses pins into a serial coded waveform suitable for radio-frequency or infrared modulation. SC2262 has a maximum of 12 bits of tri-state address pins, providing up to 531,441 address codes, thereby drastically reducing any code collision and unauthorized code scanning.
Software Design
The microcontroller has a powerful function of data processing. The control software will be implemented in the programming environment of µVision4. A software flowchart is shown in the Figure 2.
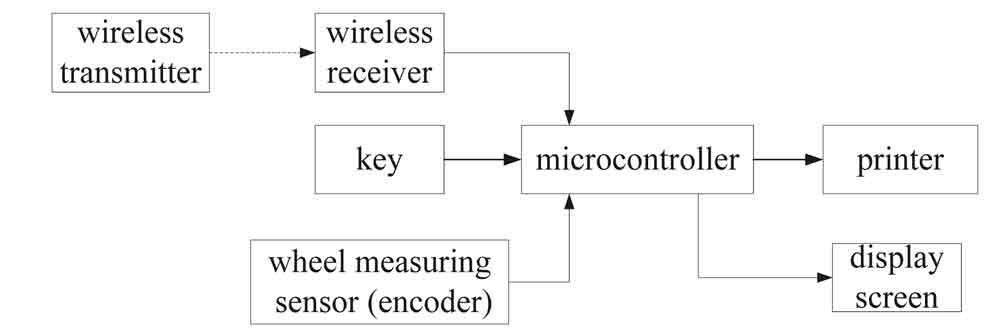
Figure 1: Hardware composition 
Figure 2: Software flowchart 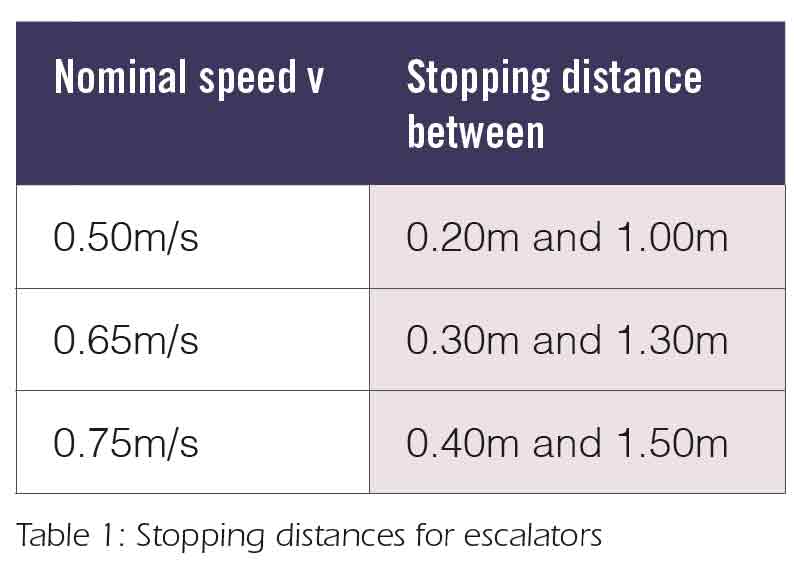
Get more of Elevator World. Sign up for our free e-newsletter.








